Under Construction
This page describes the construction of the RazTrak Digital az-el tracking system sold by
Gary Abercrombie - N8CQ, E-Mail: gabercr@gmail.com. For info you can reach Gary on MoonNet e-mail reflector.
He does not have a website.
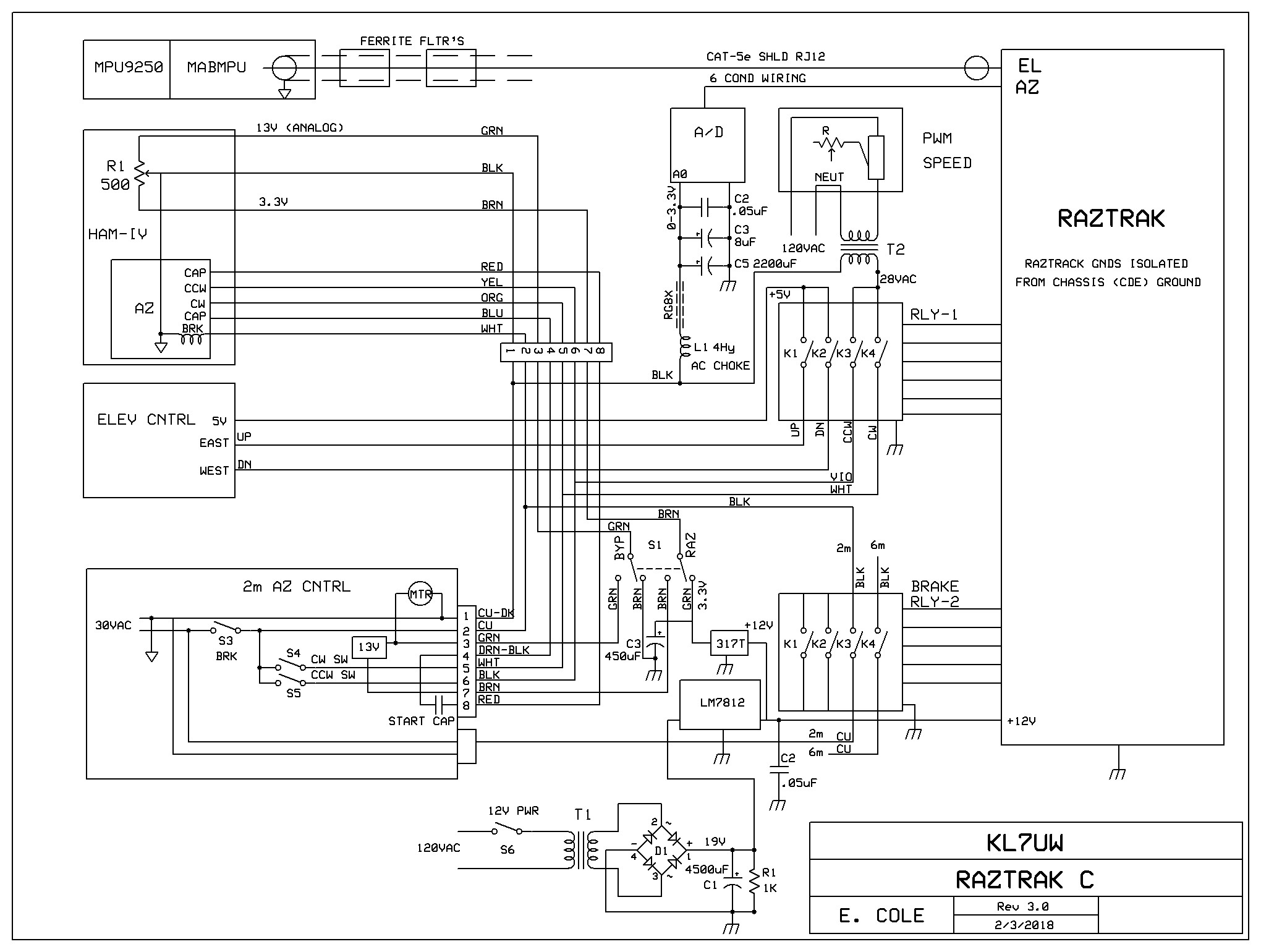
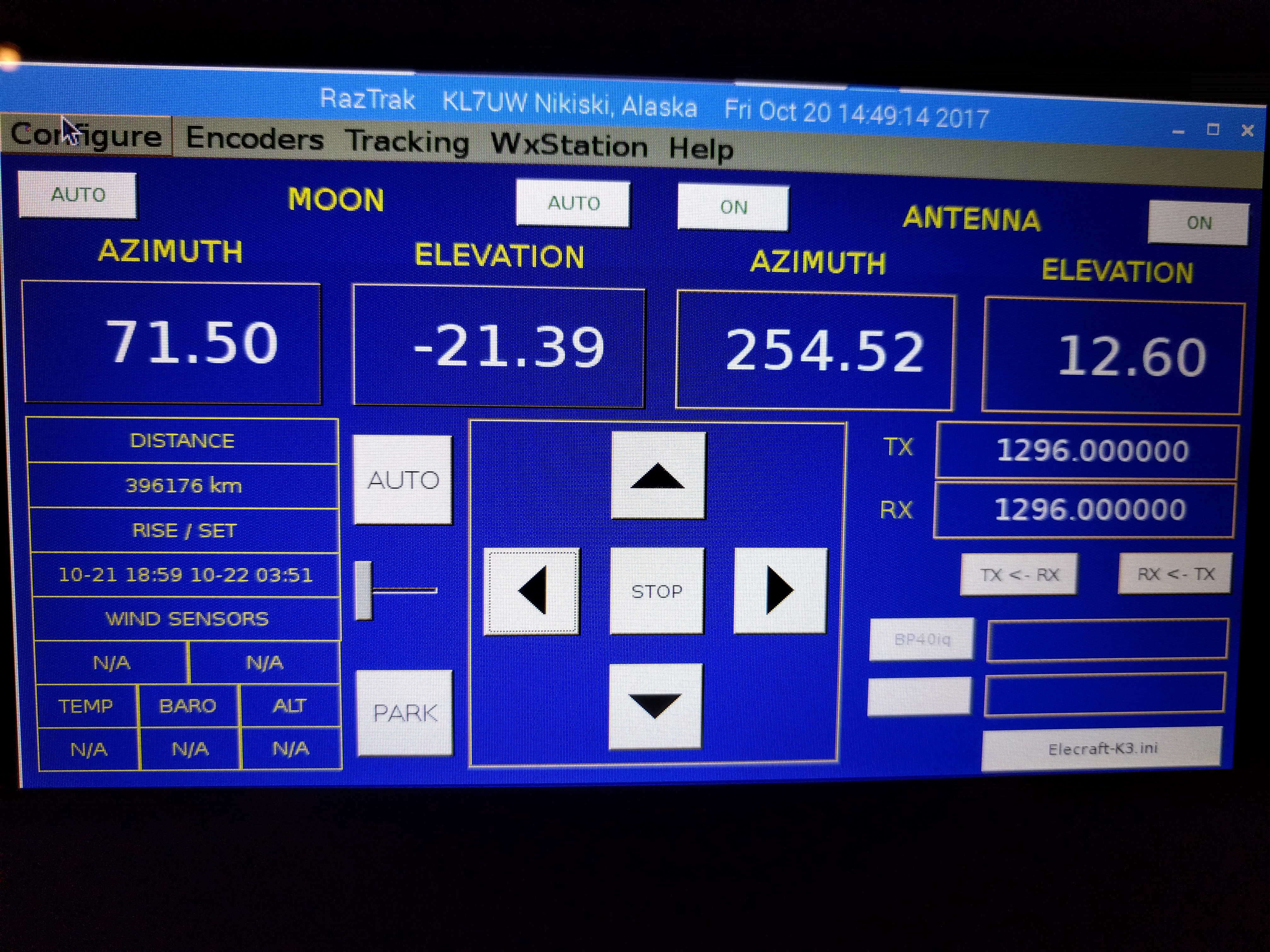
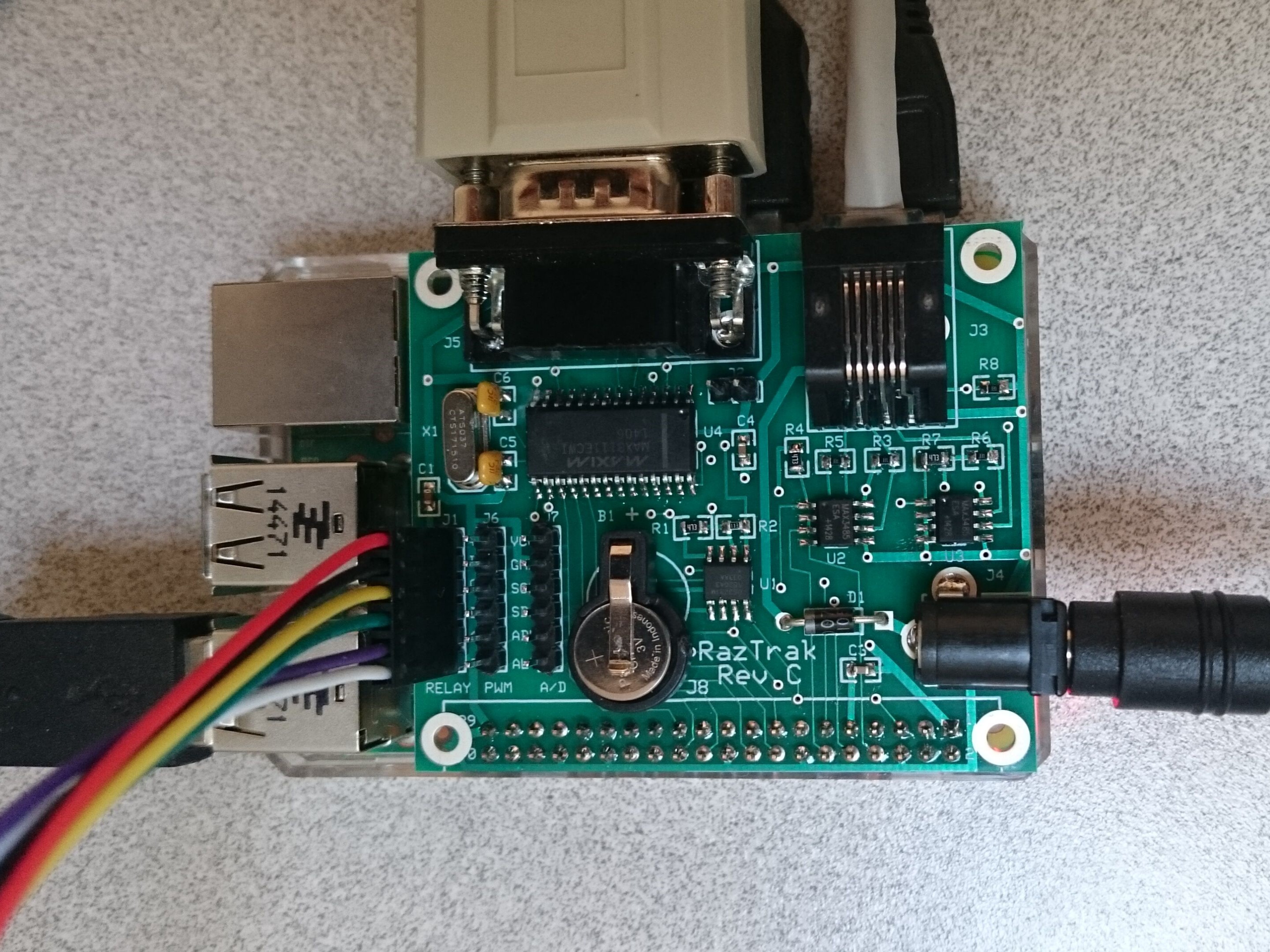
The system uses digital MAB25 encoders to provide tracking angle data to a custom interface called
RazTrak. That board provides display and control via a Raspberry Pi-3 controller and 7-inch LCD
touch screen. Data is all 3.3v logic. MABMPU boards use 5v which provides data communication
between MAB25 absolute digital encoders and the RazTrak board via RJ12 6-conductor cable.
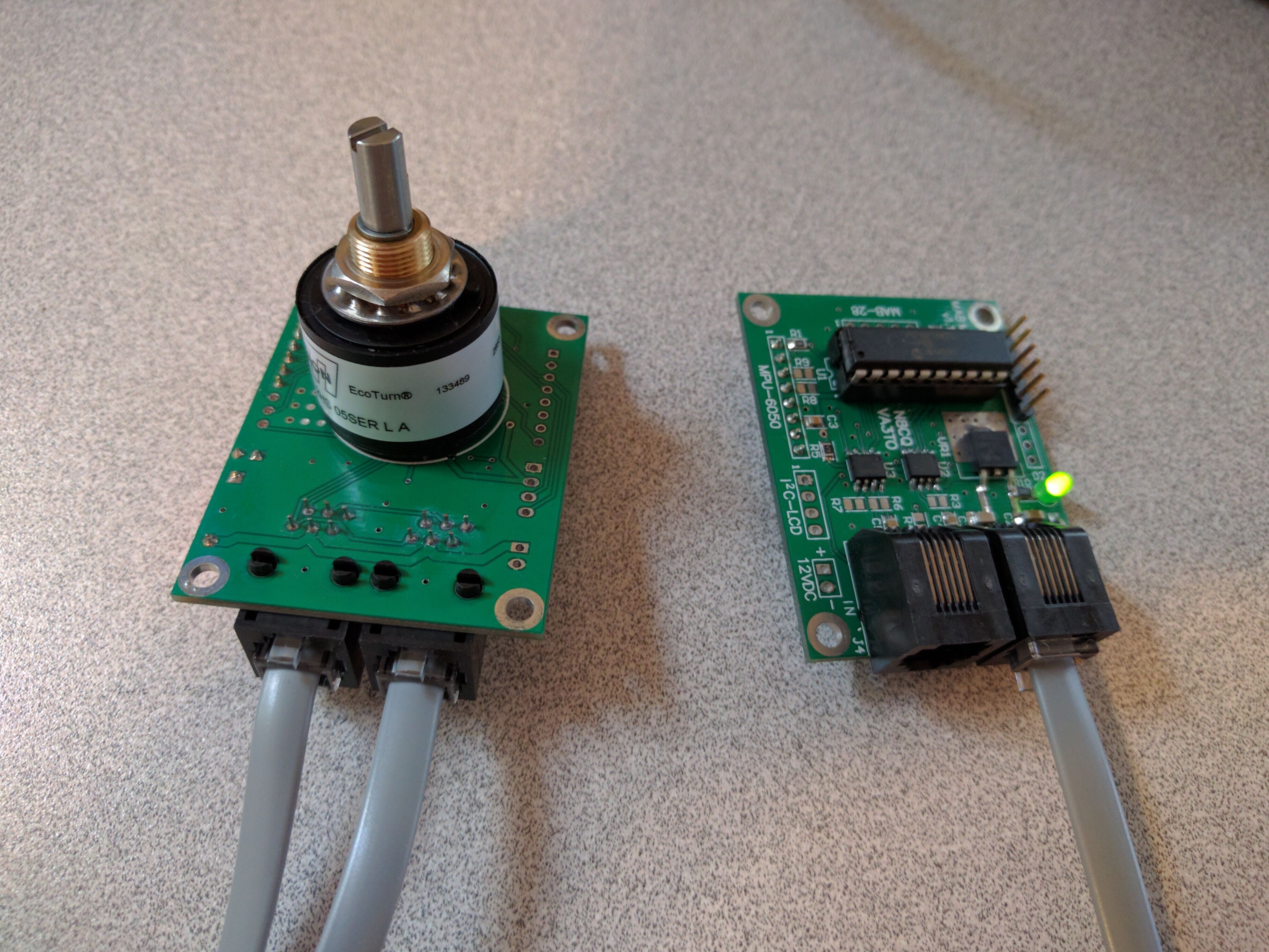
MAB25 is no longer available; use the ETS25 6x22 05SER LA.
You will not find the digital ETS25 listed on their website. They must be ordered by telephone
uing the contact number listed on their website. In Feb. 2018 they sold for $50.00. Shipping is
by USPS Airmail which is a little expensive.
To simplify adding the tracking system to an existing az-el system, the MPU9250 inclinometer is
used to provide digital elevation data without need of mechanical pedulum methods with a rotary
encoder. Azimuth would normally require a chain-drive sprocket gear attached to mast to drive
the MAB25 shaft. That would require removing the antennas array to add the az-drive gear.
Note that the system is configured with A/B switching to connect both 2m and 6m az-el systems to
the RazTrak system.
The RazTrak has internal software to provide Moon tracking.
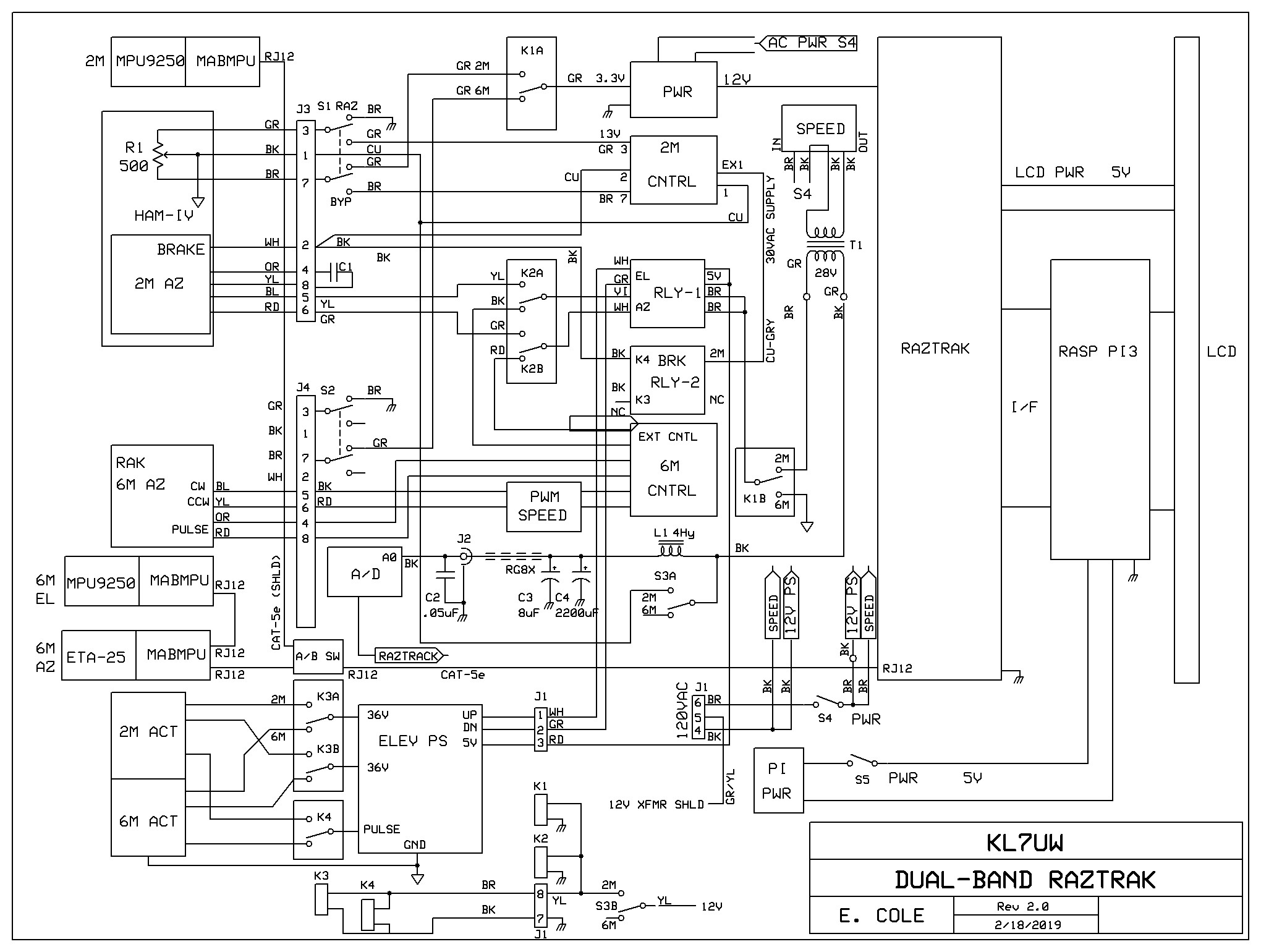
2019 Update
I've decided to install an Alpha-SPID RAK to replace the HAM-IV 2m azimuth rotator. An ETS-25 encoder
will be used with chain gear drive. The Alpha-SPID RAK controllers are
Powered with 18vac from a transformer supply which produces 24vdc (unloaded) inside the controller. Rotators
see about 14vdc under load. Updated schematic is added (below):
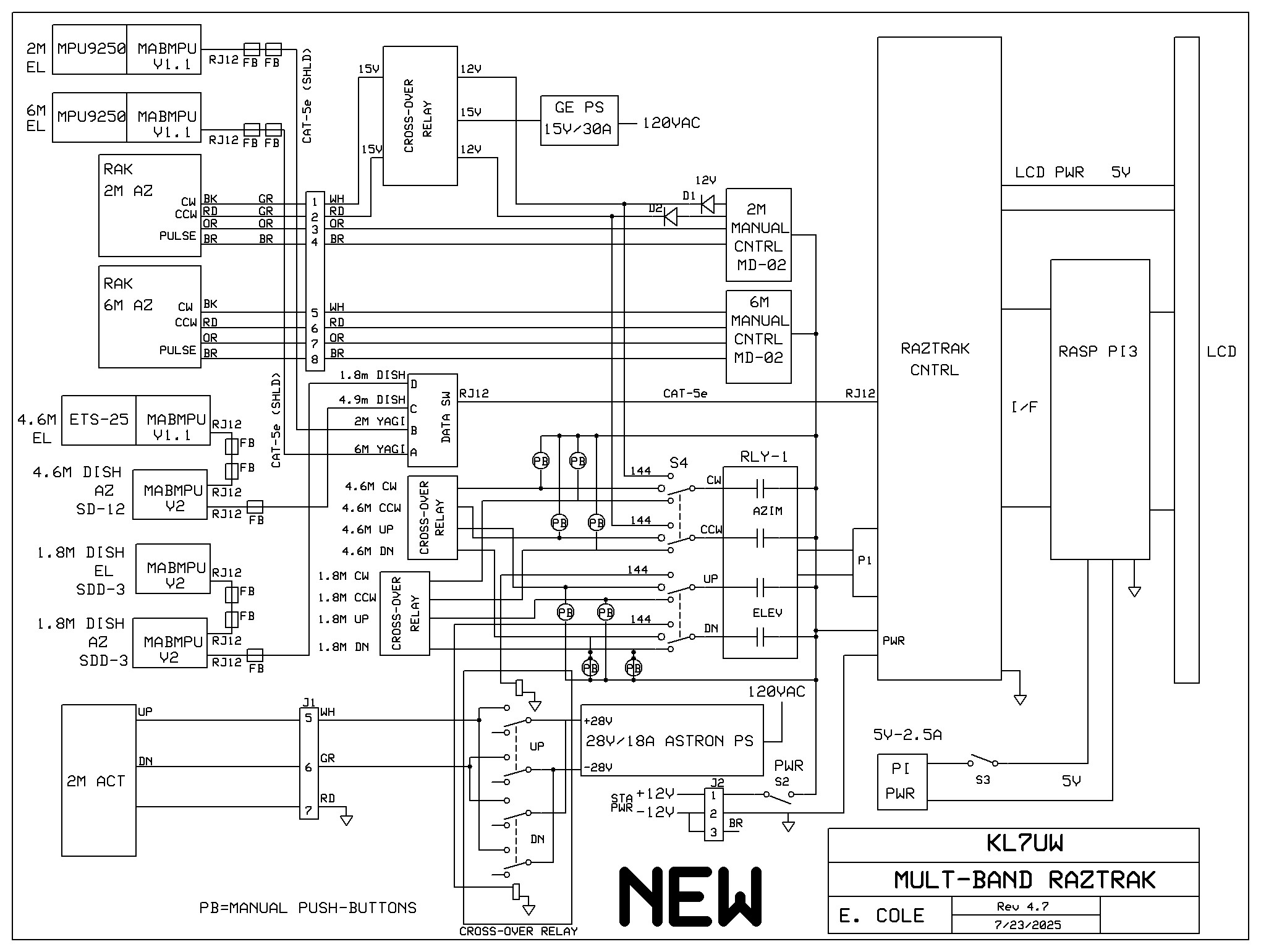
2023 Update
Demise of my 6m-eme array last August (2022) and advances made by Gary-N8CQ, bringing the V2 version of his
MABMPU board plus using slew-type rotators for my 4.9m and 1.8m dishes led to a revision in design. I bought a SP-12
Sun-Slew azimuth rotator for my 4.9m dish (1296 & 3400 eme) and recently the SPP3 az-el slew rotator for the
1.8m offset feed dish (10-GHz). Both provide orthogonal pulse trains that the MABMPU can utilize for tracking movement.
Fourth diagram (lower right):
I have several Raztrack boards which I will list on my For Sale page. SOLD
 Return to the Home page.
Return to the Home page.